MEDICAL MICRO-DEVICES & MICROROBOTICS
Applications
The fabrication of complex, high-resolution miniaturized medical devices is possible with our microFAB-3D machines, ranging from the Basic to Advanced series, which can achieve a resolution of 200 nm. Among the concrete applications, stents, mobile micro-robots, and microneedle arrays can be manufactured.
microFAB-3D is compatible with a wide range of biocompatible resins, both made in our facilities and commercially available, as well as with photo-resins certified for medical devices. This allows researchers to develop solutions that can be transferred to clinical or industrial applications. In addition, compatibility with various substrates allows integration with hybrid systems (electronic, optical, fluidic).
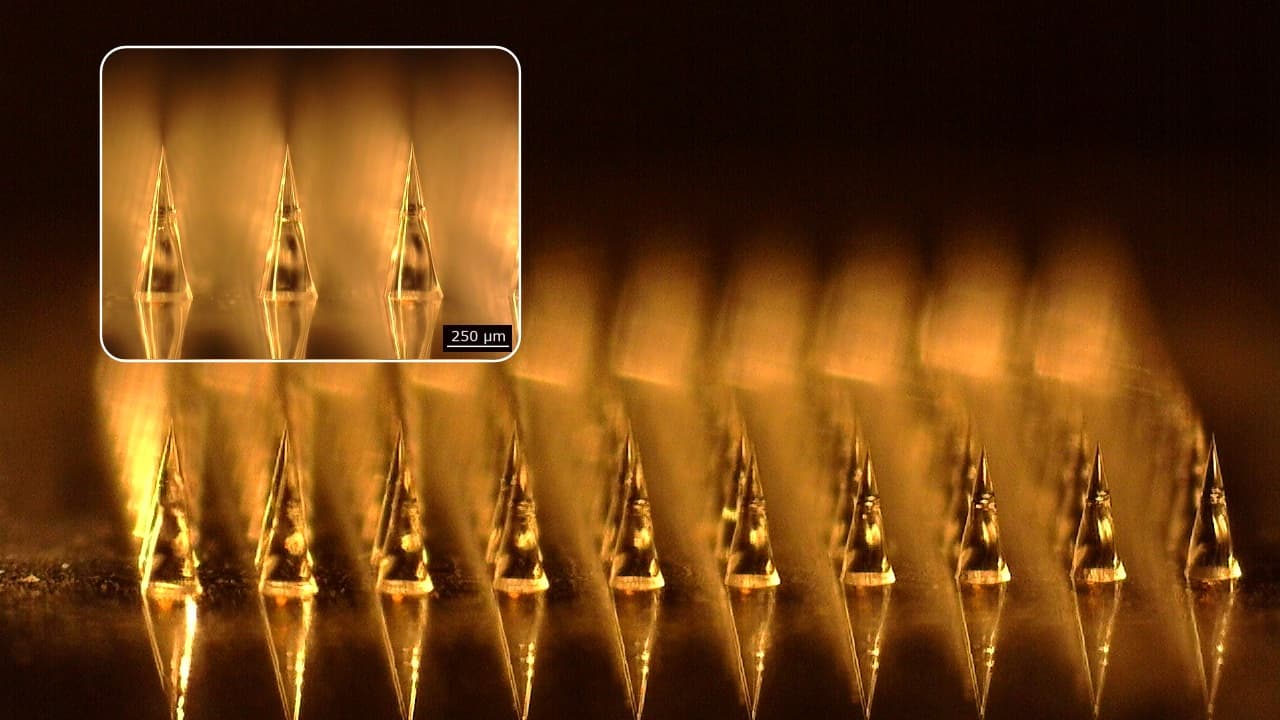
10 x 10 array of 700-µm-high solid micro-needles - Realized with microFAB-3D.Advanced
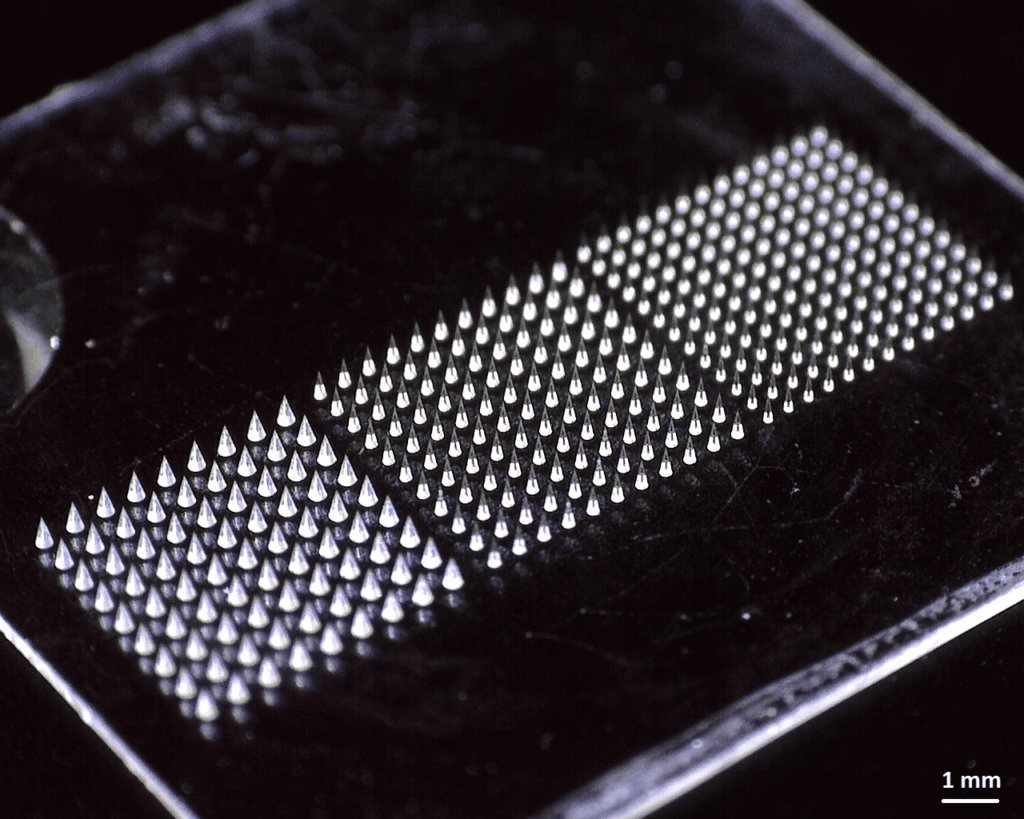
371 replications of various 600-µm-high microneedles on a 20-mm-wide, 0.4-mm-thick glass substrate
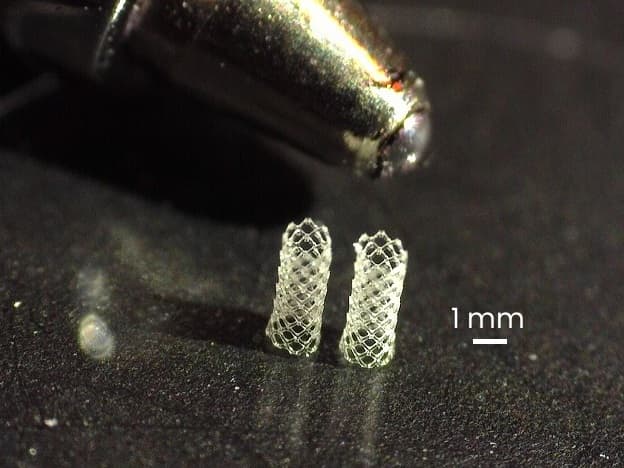
2-mm-high stents printed in a biocompatible material - Realized with microFAB-3D.Advanced
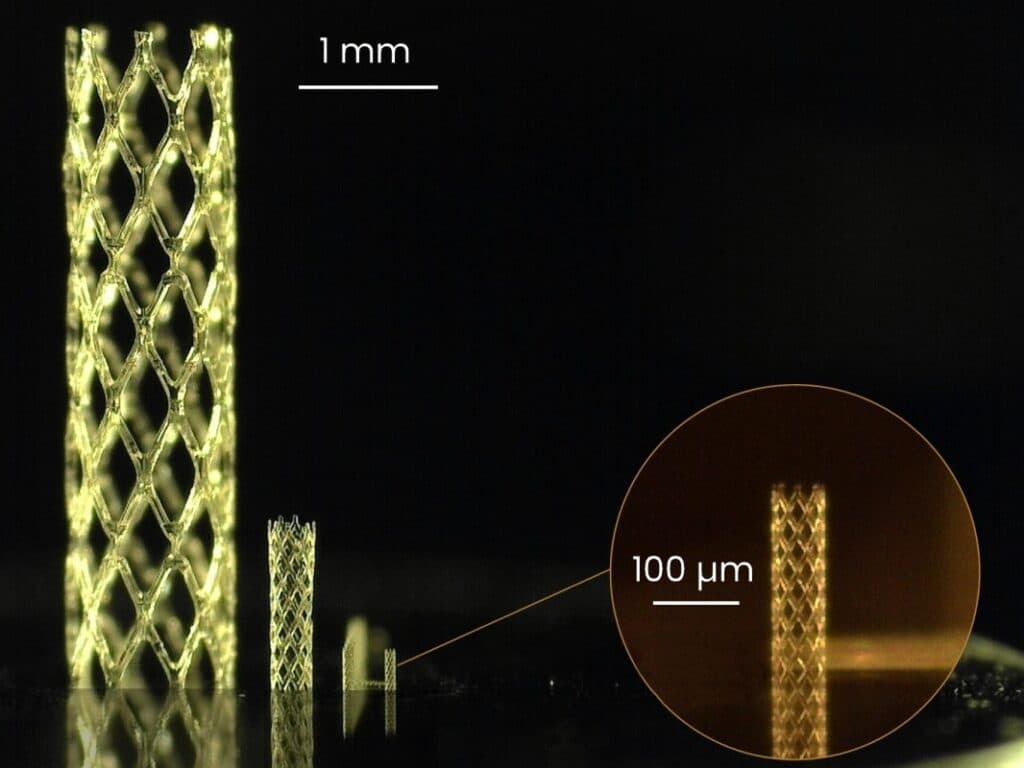
5-mm-high, 1.2-mm-high and 0.3-mm-high stents printed in a same single fabrication procedure, using respectively low, standard and high resolution for optimized printing speed and quality depending on the sizes of the structures - Realized with microFAB-3D.Advanced
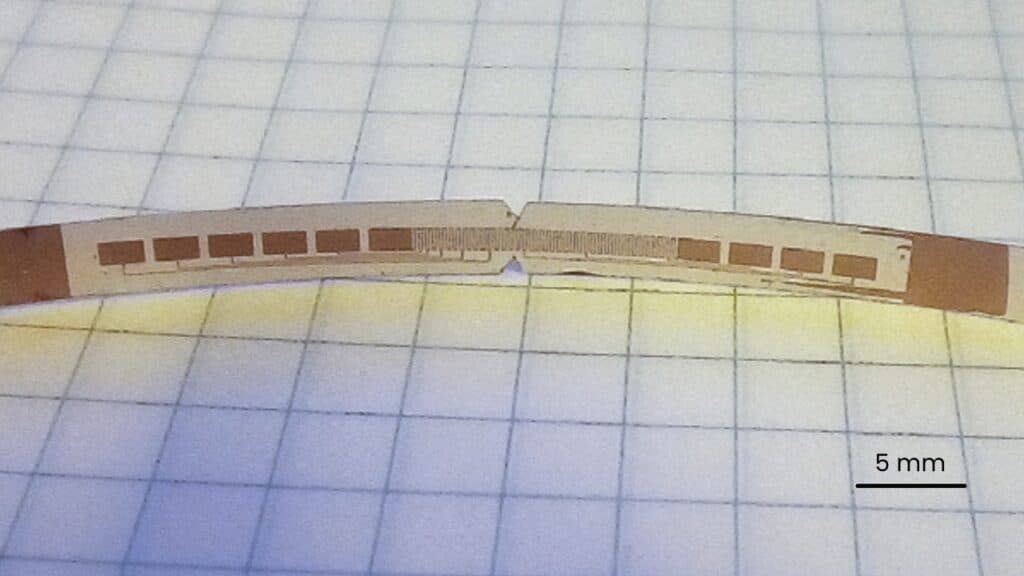
Lithography of thermometer components on a large, non-planar surface. Length of the sample: 5cm.
Courtesy of Institut Néel - Realized with Smart Print UV
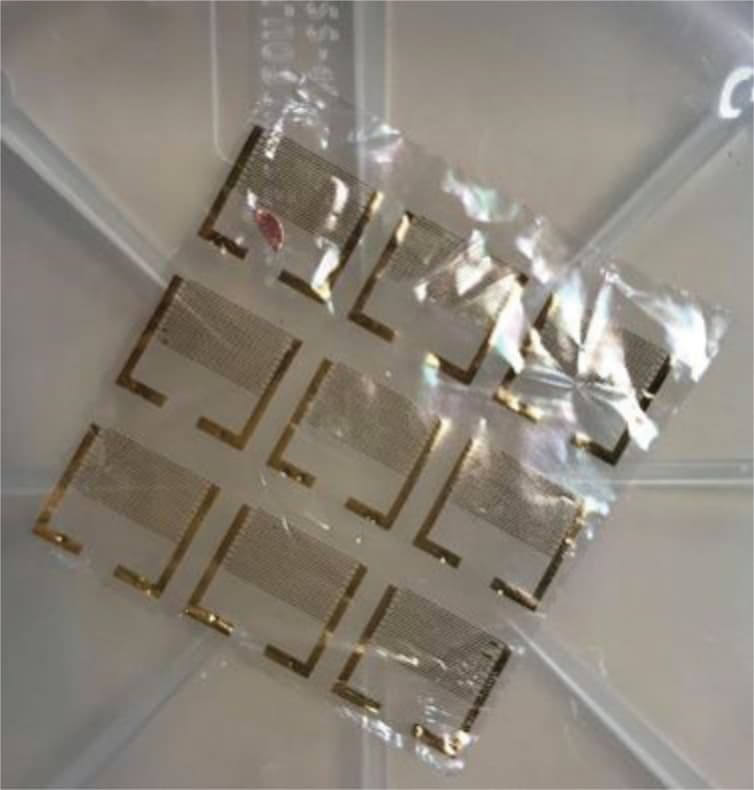
Lithography of electrodes on a graphene layer on a flexible film of parylene©.
Courtesy of Institut Néel - Realized with Smart Print UV
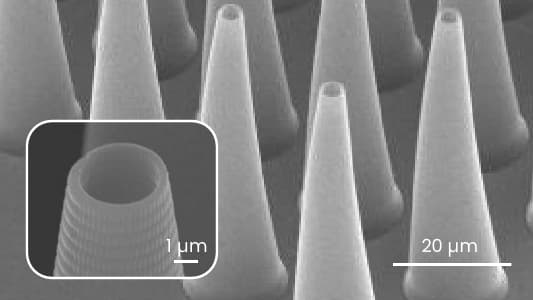
Array of 80-µm-high hollow micro-needles.
T.T. Chung, National Taiwan University - Realized with microFAB-3D.Advanced
Highlight
Integrating magnetic materials inside 3D-micro-printed structures makes their remote actuation with an external magnetic field possible. However, the nature of the magnetic material, its volume, and precise position in the structure are keys for the efficiency, dexterity, and compatibility with optical or biological functions. Herein, an original approach consists in the bonding of discrete and fully magnetic microbeads to unaffected 3D-microprinted structures.
This led to the creation of remotely controllable 100µm long micro-tweezers that can be translated, rotated, and opened with a single variable external magnetic field. The dexterity of this untethered micromanipulator allows a pick-and-place operation of 40-µm objects in a confined environment, and could open new perspectives for personalized and targeted medicine applications. Else, the demonstration of remotely controllable micro-lenses opens new perspectives for the creation of new innovative endoscopes.
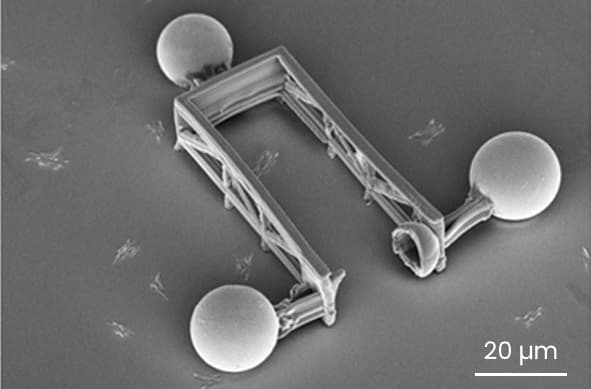
Functional micro-tweezer for gripping and movement of micro-particles.
V. Vieille et al. - G2ELab (G-INP / Néel / CNRS)
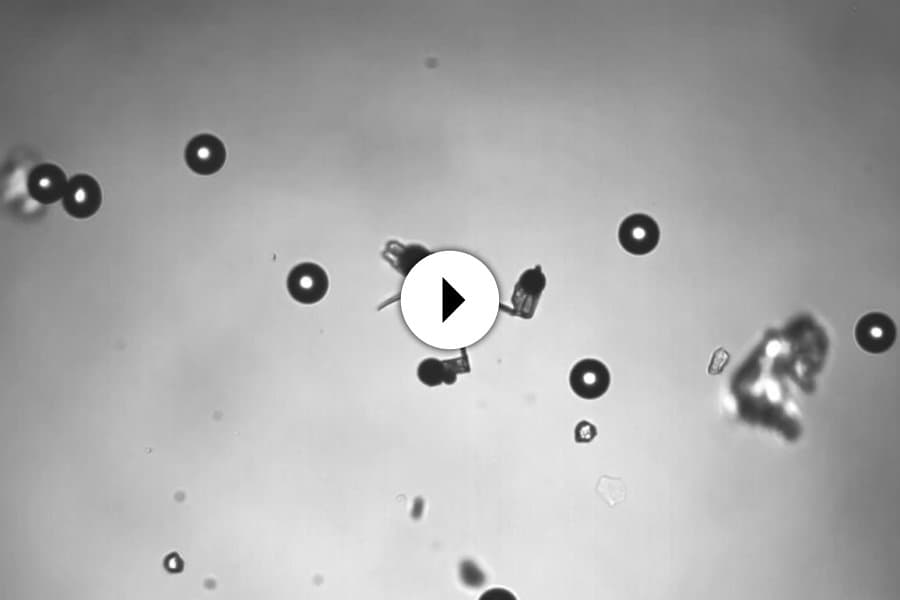
Click to watch a video of a functional micro-tweezer.